近年来,无人机在现代化军事、救援、农业、环境监测和物流等领域应用广泛。单无人机因其负载能力低,服务半径小难以满足复杂任务需求,多无人机集群协同编队通过分工合作,体现出的任务执行效率、智能化等显著优势受到广泛关注。然而,随着任务复杂性的提升、反无人机技术的发展,无人机事故层出不穷。特别是无人机集群系统,其编队控制复杂,系统内智能体数量多,当集群中的某架或多架无人机受到环境干扰、通信丢失、执行器故障等不确定因素影响时,会导致整体编队的稳定性下降,任务完成效率低等问题。此外,由于当前集群系统所采用的控制方式是基于相邻无人机之间的信息交换来进行位置、姿态的调整,当某架无人机故障后,会导致故障信息传递给相邻无人机,极易产生链式反应,威胁集群整体稳定性,严重甚至导致整个集群系统的崩溃,同时也给无人机集群系统容错控制设计带来严峻挑战。
近日,365上市公司郝伟博士团队针对考虑无人机集群系统同时受外部环境扰动、执行器故障以及机间扰动耦合传播等影响,提出基于区间观测器的无人机集群最优容错控制策略。基于基础图论,分析扰动的传播机制,建立扰动外生模型;通过构造扰动区间观测器估计系统所受扰动的上下边界,避免了传统抗扰设计中对扰动上界的依赖,放宽对控制输入的约束;同时,利用神经网络在线逼近执行器故障,并将基于执行网—评价网的强化学习控制方法有效结合,实现无需持续激励的自适应参数调整。最后,通过实时飞行实验验证,所设计控制策略能够保证无人机在故障和扰动耦合条件下的稳定性。该研究为无人机集群系统在复杂场景中的自主协作提供了新的解决思路。
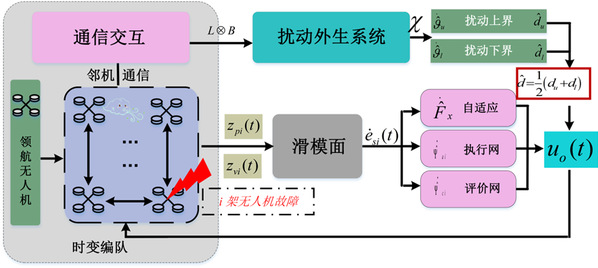
图1 控制算法框架
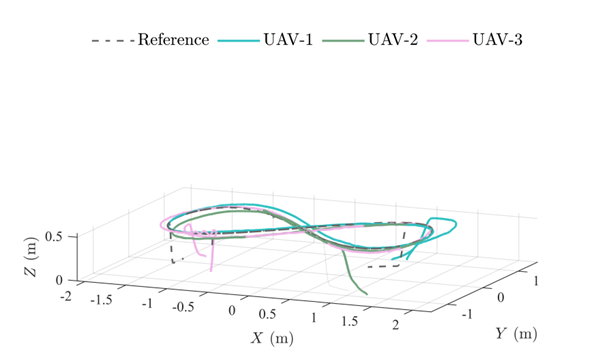
图2 无人机集群实时飞行轨迹
该研究成果以论文形式发表于《Pattern Recognition》,题目为“Fault tolerant cooperative control for multi-UAVs via interval observer-augmented reinforcement learning”,郝伟博士为通讯作者,飞行学院2023级交通运输专业硕士研究生梅童为第二作者,合作单位包括北京航空航天大学、山东大学。
《Pattern Recognition》为爱思唯尔(Elsevier)旗下的老牌权威学术期刊,专注于模式识别、计算机视觉、人工智能及机器学习领域。
该研究得到国家自然科学基金、山东省自然科学基金、山东省高校青创科技计划创新团队等项目的资助。
原文链接:
https://www.sciencedirect.com/science/article/abs/pii/S0031320326009726


